centerstage
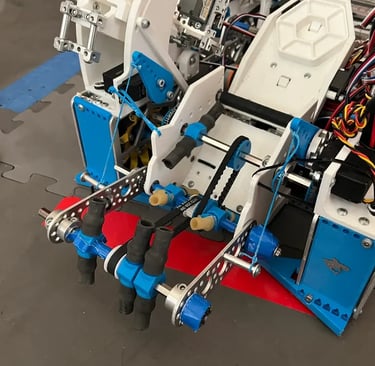
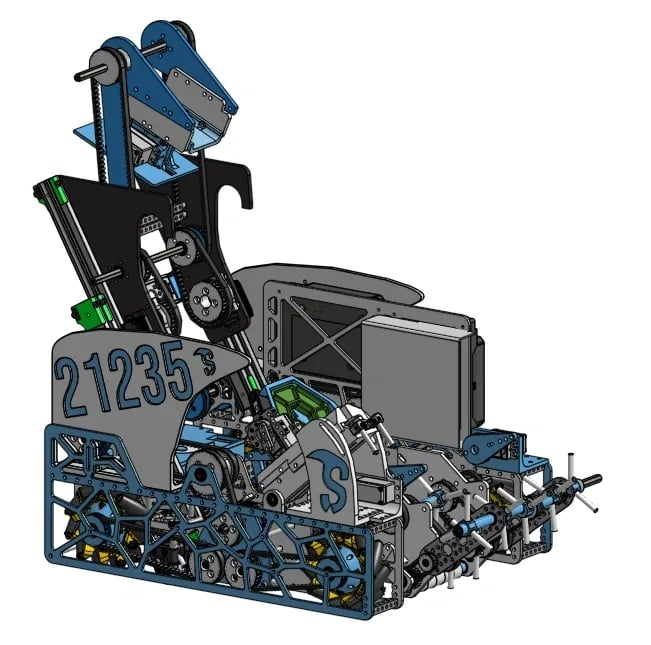
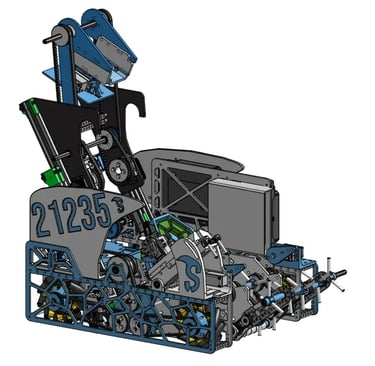
Our robot features various innovative design initiatives to effectively & efficiently complete this season's task. We consistently strive to one-up ourselves and make a robot that is representative of our collective ability.
Join us as we outline our endeavors to engineer this robot to become the best it can be!
2023-2024
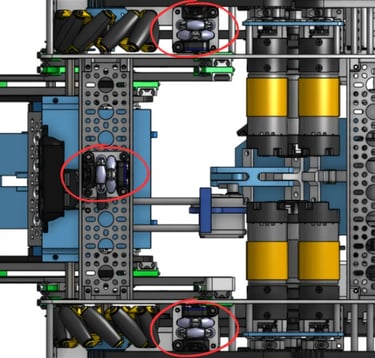
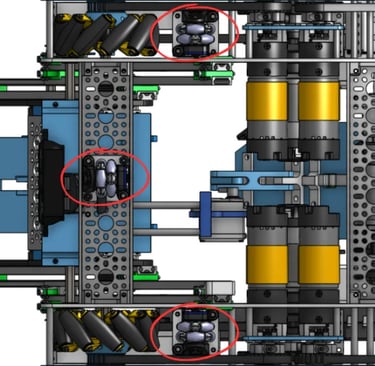
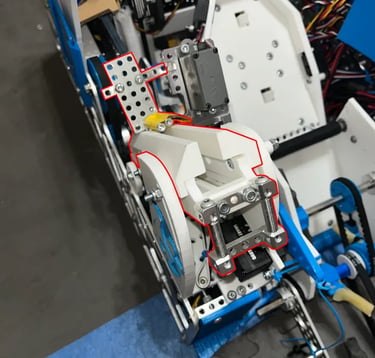
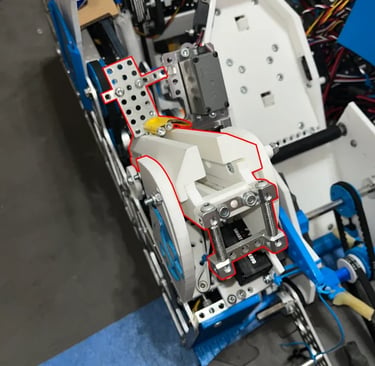
Our robot